
 Ƕ��ʽ���r����ϵ�y��RTOS���Еr�g�|�l�c�¼��|�l����{�Ȳ��ԵČ��`�c����
�r�g��2025-04-23 ��Դ���A���hҊ
Ƕ��ʽ���r����ϵ�y��RTOS���Еr�g�|�l�c�¼��|�l����{�Ȳ��ԵČ��`�c����
�r�g��2025-04-23 ��Դ���A���hҊ
����
��Ƕ��ʽ���rϵ�y�У��΄��{�Ȳ��Ե��x��ֱ�ӛQ����ϵ�y�Č��r�ԡ��ɿ��Ժ��YԴ�����ʡ����y�� �r�g�|�l�ܘ���Time-Triggered Architecture, TTT�� �� �¼��|�l�ܘ���Event-Triggered Architecture, ETT�� ���Ѓ��ӣ�
· TTT ͨ�^�̶������{���΄գ��_���_���ԕr�ӣ����������M�YԴ��
· ETT �����¼��|�l�΄գ��`���Ч�����������¼�ͻ�l���²����A�y�����t��
�S�����sǶ��ʽϵ�y���繤�I���ơ��Ԅ��{�t���O�䣩���������L���μ��Ć�һ�{�Ȳ������y�ԝM���ψ����Č��r��Ҫ����ˣ�����{�Ȳ��ԣ�Hybrid Scheduling���ɞ��о����c�����Č�̽ӑ���OӋԭ�������F���������H���ð�����
һ�����ĸ��TTT�cETT�Č����c���a
1.1 �r�g�|�l�ܘ���TTT��
���x�������΄հ��̶����ڣ���1ms��10ms�����У��΄��gͨ�^�r�g��Ƭ��Time Slicing������CPU�YԴ��
���c��
· �_���ԣ��΄Ո��Еr�ӿ��A�y���m�ό���ȫ�ԺͿɿ���Ҫ��ߵĈ������纽�պ��죩��
· �YԴ�̶����΄�ռ��CPU�r�g�����ڛQ���������YԴ������
· ȱ�c�����e�������M�YԴ���o������푑�ͻ�l�¼���
���͑��ã�
· ��܇ECU�еİl�әC����ģ�K��
1.2 �¼��|�l�ܘ���ETT��
���x���΄ՃH���¼��l���r����������Дࡢ�Ñ�ݔ�룩�|�l���У����ȼ����¼��o���̶țQ����
���c��
· �`���ԣ��YԴ������䣬��Ч����CPU��
· ���_���ԣ��¼�ͻ�l���܌����΄Փ�ռ�_ͻ�����l���t���ӡ�
· ȱ�c���y�Ա��C�P�I�΄յĕr�Ӵ_���ԡ�
���͑��ã�
· ���ܼҾ��еĂ���������̎����
1.3 ����{�ȵı�Ҫ��
�S��ϵ�y��ͬ�r�M�㣺
1. �P�I�΄գ��簲ȫ���ƣ��Ĵ_���ԕr�ӣ�
2. ���P�I�΄գ��电���ɼ������`�����c��Ч��
����{��ͨ�^ �Ӽܘ� �� �΄Մ��֣���TTT��ETT�ă��ݽY�ϣ��ɞ���sϵ�y�������x��
��������{�Ȳ��Ե��OӋ�c���F
2.1 ����{�ȵķ��
����{�Ȳ��Կɷ֞���
1.
�ӻ�ϼܘ���
2.
o �όӣ�TTT���������P�I�΄գ����̶����ڈ��С�
o �ӣ�ETT����̎�����P�I�΄գ����¼��|�l��
o ʾ������܇ϵ�y�У��l�әC���ƣ�TTT���c����������ETT����
3.
�΄ռ�����{�ȣ�
4.
o ��һ�{����ͬ�r����TTT��ETT�΄գ�ͨ�^���ȼ��ٲû�r�g���ڄ����Fƽ�⡣
2.2 �����OӋԭ�t
2.2.1 �΄Մ���
· �P�I�΄գ�TTT����
o ��_���ԕr�ӵ��΄գ��繤�I�C�����\�ӿ��ƣ���
o �̶����ڣ���1ms�����У����ȼ���ߡ�
· ���P�I�΄գ�ETT����
o �¼��ӵ��΄գ��电���ς����Ñ����棩��
o ���ȼ���֮���H��CPU���e�r���С�
2.2.2 �{���㷨
�����㷨��
1.
�ӑB���ȼ��{����
2.
o TT�΄�ʼ�K������ET�΄ա�
o ET�΄���TT�΄յĿ��e���ڃȓ�ռ�̓��ȼ��΄ա�
3.
�r�g���ڸ��x��
4.
o ���r�g�S���֞� TT���ڣ��HTT�΄Ո��У��� ET���ڣ�ET�΄տɈ��У���
o ͨ�^Ӳ��Ӌ�r����ܛ����̖�ГQ���ڡ�
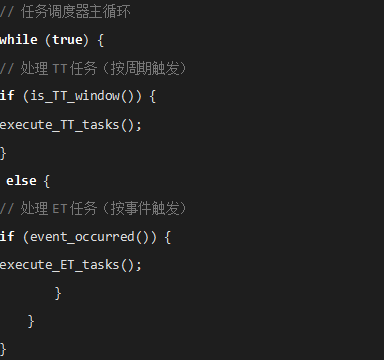
�δ��aʾ�������ڃ��ȼ��Ļ���{�ȣ���
2.3 ���F�����c��Q����
2.3.1 �YԴ�����c��ռ
· ���}��ET�΄տ��ܓ�ռTT�΄յ�CPU�YԴ������TT�΄��e�^��ֹ�r�g��
· ��Q������
o ���ȼ����D���o��ET�΄Ճ��ȼ�����TT�΄ա�
o �r�g��Ƭ�A������TT�΄��A���̶��r�gƬ��ET�΄ՃH���A���r�g����С�
2.3.2 �ӑBؓ�dƽ��
· ���}��ET�΄�ͻ�l���܌���ϵ�y�^�d��Ӱ�TT�΄Ո��С�
· ��Q������
o ET�΄�����������O��ET�΄յ������Еr�g������L�ȡ�
o ���m���{�ȣ�����ϵ�yؓ�d�ӑB�{��ET�΄յă��ȼ���
��������{�ȵĵ��͑��È���
3.1 ���I�Ԅӻ�����ϵ�y
������
· TT�΄գ�PLC����늙C�������\�ӣ�1ms���ڣ���
· ET�΄գ����������ψ��¼��|�l����
���F������
· ���÷Ӽܘ���TT�΄�ͨ�^Ӳ�����r���|�l��ET�΄�ͨ�^�Д�̎����
· ͨ�^ OSEK��Open System and Electronics for Cars�� �˜ʌ��F�΄Ճ��ȼ����x��
���ϵ�y
������
· TT�΄գ��l�әC���ƣ�10ms���ڣ����x܇ϵ�y��1ms���ڣ���
· ET�΄գ�܇�d�ʘ�ϵ�y푑��Ñ�������
���F������
· AUTOSAR��Automotive Open System Architecture�� ֧�ֻ���{�ȣ�
o ͨ�^ RTE��Runtime Environment�� ����TT��ET�΄յ�ͨ�š�
o ʹ�� �r�g�|�lͨ�ţ�TTCAN�� �����P�I�΄յĴ_���ԡ�
3.3 �t���O��

������
· TT�΄գ����ʱO�y�������Բɘӣ���
· ET�΄գ��o���������ʮ����|�l����
���F������
· ͨ�^ FreeRTOS �� ܛ�����r�� ���FTT�΄գ��Д�������̣�ISR��̎��ET�΄ա�
· ͨ�^ ���ȼ����D���o �_��TT�΄յĕr�Ӵ_���ԡ�
�ġ������cδ������
4.1 ��ǰ����
1. ���s�����ӣ�����{����̎���΄Մ��֡����ȼ��ٲá��YԴ���x�ȏ��s߉��
2. ���Ĺ�����ET�΄յĄӑB���п�������ϵ�y���ġ�
3. ��C�c�yԇ�����ϵ�y�ĕr�ӷ�������ע��yԇ�y���^�ߡ�
4.2 ��Q�����c���gڅ��
1. ��ʽ����C��
o ʹ��ģ�͙z�y���ߣ��� UPPAAL����C����{�ȵĕr��߅�硣
2. ����Ӌ����٣�
o ������ET�΄�ж�d���f̎��������GPU��FPGA����������CPUؓ�d��
3. ���m���{���㷨��
o ���ڙC���W���A�y�΄�ؓ�d���ӑB�{��TT��ET�΄յ��YԴ���䡣
4.3 �˜ʻ��c����֧��
· IEC 61508/ISO 26262�������{�ȵİ�ȫ���ṩ�J�C��ܡ�
· �����֧�֣�
o Wind River VxWorks��֧�ֻ���{�ȵĹ��I��RTOS��
o Matlab/Simulink���ṩ����{��ģ�ͷ��湤�ߡ�
�塢���Y�cչ��
����{�Ȳ���ͨ�^�Y��TTT��ETT�ă��ݣ���Ƕ��ʽϵ�y�ṩ�˸��`���Ч�Č��r�Ա��ϡ��S�����I4.0���Ԅ��{���I��ļ��g�lչ������{�Ȍ����R���ߵ�����
· �_�����c�rЧ�Ե�ƽ�⣺����ڱ��C�P�I�΄Ռ��r�Ե�ͬ�r���������P�I�΄յ���Ч��
· ����ϵ�y���ɣ��c߅��Ӌ�㡢5Gͨ�ŵĽY�ό��Ƅӻ���{�ȵ��Mһ�����¡�
δ��������{�ȿ����c AI�ӵ����m���{�� �Y�ϣ����F�����ܵ��YԴ�������_�l������������ϵ�y�����x����m�Ļ�ϲ��Կ�ܣ���AUTOSAR������ͨ�^��ʽ����C�_��ϵ�y�Ŀɿ��ԺͰ�ȫ�ԡ�
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������ȌW���Į����z�y�㷨�ڕr�g���Д����еđ���Ƕ��ʽ���r����ϵ�y��RTOS���Еr�g�|�l�c�¼��|�l�������Arm Cortex-M55��������AIָ��Uչ�c�����{�������[ʽ��ʾ��3D�������s�c���r��Ⱦ���g���`Rust�Z������CǶ��ʽ�_�l�е���ɱ������c�ȴ氲ȫ��Ԅӻ��C���W��(AutOML)��Ƕ��ʽҕ�X�΄��е�NAS���Zephyr RTOS�ڮ������̎�����е��΄շ����cؓ�d�������ڏ����W���ęC����·��Ҏ���㷨��ROS�еČ��F�c�� Ƕ��ʽLinuxϵ�y��eBPF���g���F���r�W�j�����O�������¼��ӵĮ���IO��܌��F�cЧ�ܷ���
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ������ȌW���Į����z�y�㷨�ڕr�g���Д����еđ���Ƕ��ʽ���r����ϵ�y��RTOS���Еr�g�|�l�c�¼��|�l�������Arm Cortex-M55��������AIָ��Uչ�c�����{�������[ʽ��ʾ��3D�������s�c���r��Ⱦ���g���`Rust�Z������CǶ��ʽ�_�l�е���ɱ������c�ȴ氲ȫ��Ԅӻ��C���W��(AutOML)��Ƕ��ʽҕ�X�΄��е�NAS���Zephyr RTOS�ڮ������̎�����е��΄շ����cؓ�d�������ڏ����W���ęC����·��Ҏ���㷨��ROS�еČ��F�c�� Ƕ��ʽLinuxϵ�y��eBPF���g���F���r�W�j�����O�������¼��ӵĮ���IO��܌��F�cЧ�ܷ���

