
 �����¼��ӵĮ���IO��܌��F�cЧ�ܷ���
�r�g��2025-04-15 ��Դ���A���hҊ
�����¼��ӵĮ���IO��܌��F�cЧ�ܷ���
�r�g��2025-04-15 ��Դ���A���hҊ
���ԣ��߲��l�����µ�IOģ�����M֮·
�ڮ����W�����У��߲��l�������t�ѳɞ���������y��ͬ������IOģ�ͣ���ྀ��/���M�̣����������ГQ�_�N�ȴ�ռ�øߵȆ��}���y�ԑ����f���������f�����l�B�ӡ��¼��Ӯ���IO��ܣ���Node.js��Netty��Python asyncio��ͨ�^������IO�c�¼�ѭ�h�C�ƣ����F�ˆξ��̃ȵĸ�Ч�YԴ�{�ȣ��ɞ�F���ֲ�ʽϵ�y�����rͨ�š����ռܘ��Ļ�ʯ�����Č�����̽ӑ�¼��Ӯ���IO�ĺ���ԭ�������F��������ͨ�^���ܜyԇ���Ƚ�ʾ���ڸ�ؓ�d�����µă����cƿ�i��
һ���¼����c����IO�ĺ���ԭ��
1.1 ͬ���c����IO�ı��|�^�e
ͬ��IO���{�þ�����ȴ�IO������ɣ���read()�����������;w����
����IO���{�ú��������أ�ͨ�^���{��Future/Promise�C�Ʈ���֪ͨ�Y������io_uring��epoll����
1.2 �¼���ģ�͵�����֧��
�¼�ѭ�h��Event Loop���������{������݆ԃIO�;w�¼����|�l���{��
������IO��ͨ�^fcntl(fd, F_SETFL, O_NONBLOCK)�O���ļ��������������ģʽ��
��·���ã�Multiplexing��������epoll��Linux����kqueue��BSD����IOCP��Windows���O �����ļ���������
1.3 Reactor�cProactorģʽ����
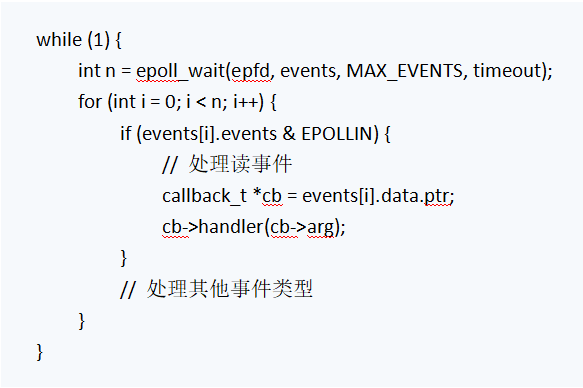
Reactorģʽ�����ھ;w�¼�֪ͨ���Ñ��B̎��IO����epoll_wait + read/write����
Proactorģʽ���ɃȺ˻������IO�������Ñ��B̎������¼�����Windows IOCP����
�����¼��Ӯ���IO��ܵČ��F
2.1 ��ܺ��ĽM���OӋ
�¼�ѭ�h���棺���F�¼�ע�ԡ��O ���ְl߉��
�f�h�����ӣ�̎��HTTP��WebSocket�ȅf�h�ľ���a��
���{����ӣ�֧�օf�̣�Coroutine����Promise�ʽ�{�á�
�¼�ѭ�h��C�δ��aʾ��
2.2 �����΄��{�ȃ���S
�΄���зּ����^�ָ߃��ȼ����綨�r�΄գ��c�̓��ȼ��΄ա�
�f���ГQ������ͨ�^ucontext��Boost.Context�p���������ГQ�_�N��
�㿽ؐ���g��ʹ��sendfile()��mmap�p�كȴ���ơ�
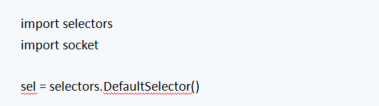
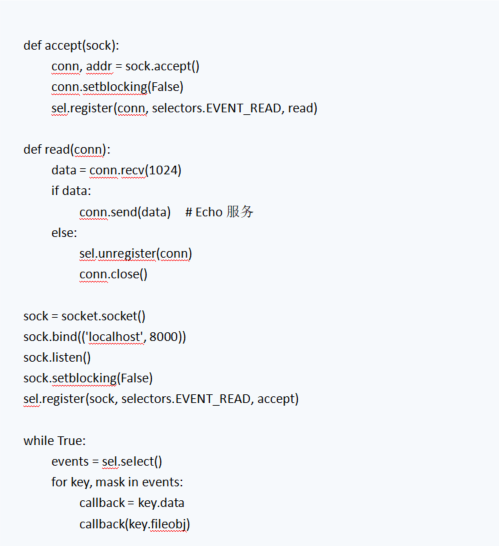
2.3 ���F������Python asyncio�����
����Ч�ܷ������¼��ӿ�ܵă��ӄ��y
3.1 �yԇ�h���c����
Ӳ�����ã�4��CPU/8GB�ȴ棬ǧ�W�j��
���y���ߣ�wrk��HTTP����redis-benchmark��TCP����
���ȿ�ܣ�Node.js��Tornado��Python����Netty��Java����
3.2 ����ָ�ˌ���
��� ��������QPS�� ƽ�����t��ms�� CPUռ���ʣ�%�� �ȴ�ռ�ã�MB��
Node.js 38,000 1.2 85 120
Tornado 12,000 3.5 70 90
Netty 45,000 0.8 92 150
ͬ������ģ�� 2,500 25.0 98 300
3.3 ƿ�i�����c�������g
CPU�ܼ����΄գ��¼�ѭ�h����������JSON����������ͨ�^Worker���̳ط�����
���{�تz��Ƕ���{���´��a�S�o���y����ͨ�^async/await�Z���ǃ�����
�ȴ�й©��δ���rע�N�¼��O �����]�����Ì��¡�
�ġ����𣺘���������HTTP����������
4.1 �����c�OӋ
���ܣ�֧���f�����l�B�ӣ��ӑB·�ɣ�Ո���^�V��
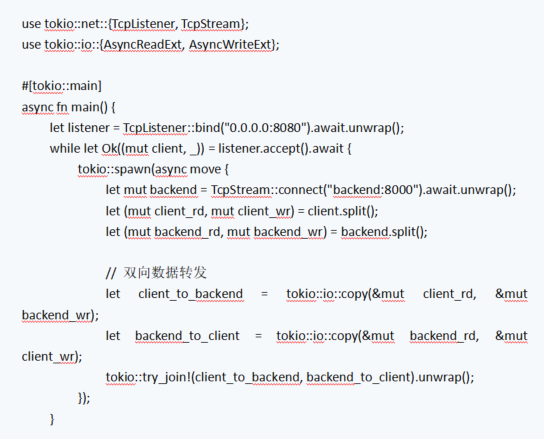
���g����Rust + Tokio��ܣ�����io_uring�ĸ�Ч�����\�Еr����
�P�I���aƬ��
4.2 ���܃����ɹ�
���������ΙC̎�������_50,000 QPS��
���t��P99���t������5ms�ԃȡ�
�塢δ��څ���c����
�Ⱥ˼�������Linux io_uring�cWindows IOCP���Mһ���ںϡ�
����Ӌ��֧�֣�����GPU/DPU���مf�h������
��ԭ�����ɣ��cService Mesh����Istio����Serverless�ܘ���ȽY�ϡ�
�Y�Z
�¼��ӵĮ���IO���ͨ�^�O���YԴ�����ʺ͵����t푑����ѳɞ�߲��lϵ�y�ĺ��Ļ��A�Oʩ���_�l��������������әC�ƣ��Y�ϘI�Ո����x�����ԣ����ܳ�ְl�]�䝓����
 �n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ Ƕ��ʽLinuxϵ�y��eBPF���g���F���r�W�j�����O�������¼��ӵĮ���IO��܌��F�cЧ�ܷ����������ɿ�¡���ܣ�PUF����Ƕ��ʽ�O����������c����Ƕ��ʽ߅���O����ڳ�����LoRa�{�Ƶ����m�����lͨ�����������ռ����g�ğo늳�Ƕ��ʽϵ�y�OӋ���ĭh�������������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQǶ��ʽϵ�y�л���Ӳ����������AES-GCM�������܃�����Transformerģ��ϡ�軯Ӗ���c�������ټ��g���������ܼ����W���c�ğo��վͨ�š������ڷ���ɢ�����ģ���������g���ȣ�INT8�c���M�ƾW�j��BNN�� �ľ����c
�n�̷������A���hҊ��NXP�Ƴ�i.MX8M Plus�_�l�c���`�n�̷���������HarmonyOSϵ�y�����W�_�l�����n�̣��n�̷�����HaaS EDU K1�_�l�̳̣����n��ҕ�l��Դ�a���°�C�Z�Ծ���֮�����Z��ҕ�l�̳��ذ�ٛ�ͣ�Ƕ��ʽ���rֵ2000Ԫ��Ƕ��ʽ���b�̴̳�Y�����M�ͣ����㶮Ƕ���rֵ1000Ԫ������ARMϵ��ҕ�l������̳����r���t���������¡�ARM�n���n�Ì�䛾��A��ҕ�l���M�Iȡ���Ⱥ�Դ Ƕ��ʽLinuxϵ�y��eBPF���g���F���r�W�j�����O�������¼��ӵĮ���IO��܌��F�cЧ�ܷ����������ɿ�¡���ܣ�PUF����Ƕ��ʽ�O����������c����Ƕ��ʽ߅���O����ڳ�����LoRa�{�Ƶ����m�����lͨ�����������ռ����g�ğo늳�Ƕ��ʽϵ�y�OӋ���ĭh�������������W����CRL���ڹ��I�C���˹�������ϵ�y�еěQǶ��ʽϵ�y�л���Ӳ����������AES-GCM�������܃�����Transformerģ��ϡ�軯Ӗ���c�������ټ��g���������ܼ����W���c�ğo��վͨ�š������ڷ���ɢ�����ģ���������g���ȣ�INT8�c���M�ƾW�j��BNN�� �ľ����c

