��(d��ng)ǰλ�ã���� > Ƕ��ʽ��Ӗ(x��n) > Ƕ��ʽ�W(xu��)��(x��) > �v������ > U-BOOT ʹ�ô����\��4412������
 U-BOOT ʹ�ô����\��4412������
�r�g��2017-11-24 ��Դ��δ֪
U-BOOT ʹ�ô����\��4412������
�r�g��2017-11-24 ��Դ��δ֪
�P(gu��n)�I�֣�u-boot ��� ���� uart �{(di��o)ԇ loadb kermit
���҂���ϤӲ��ƽ�_���^�̮�(d��ng)�У�ͨ����ʹ�������a�{(di��o)ԇ��ʽ�M��ԇ���C�������ֶ���ͨ�^JTAG+openocd �M��GDB���{(di��o)ԇ���@�N��ʽ���Ԍ��r�^����a��Ӳ����Ӱ푼����a�Ĉ�(zh��)������Dz����������^���£�������Ҫ������jtag�B�������ڛ]��jtag�ėl�����҂�����ͨ�^����U-boot ��loadb��go����F(xi��n)ͨ�^���ڂ�ݔ���d����(zh��)�������a����(d��ng)Ȼ�@������ȱ�c���҂��o���������\�еļ���(ji��)�^�̡�
�����҂�Ҫͨ�^�鿴�_�J���������ʼ��(zh��)�е�ַ��0x40008000
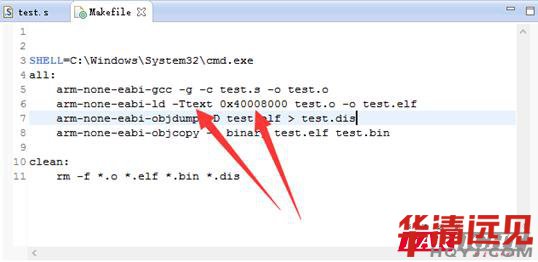
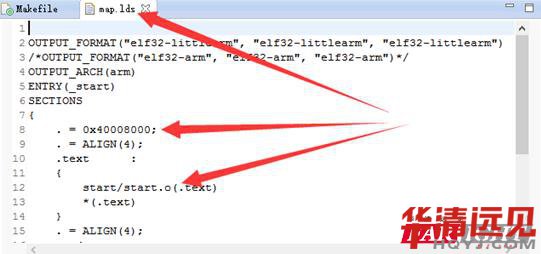
�@����ַ��Ҳ�����ں�Y����.lds���B���_�����O(sh��)��
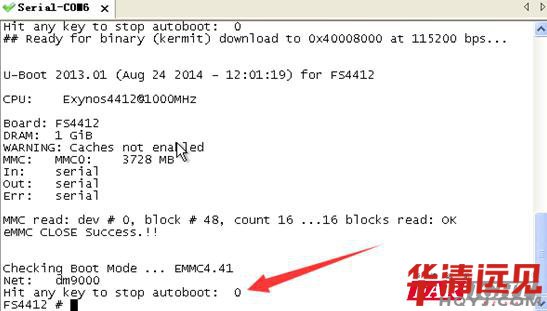
�_�J��ַ���҂�ʹ�� �������K�ˡ� ��SecureCRT�� ��֧�� kermit��ݔ�f(xi��)�h�Ĵ���ͨ�Ź��ߴ��_�c�_�l(f��)��Ĵ����B�ӡ��_���_�l(f��)���Դu-BOOT�����\�У��چ��ӵ���(sh��)��0ǰ���������Iֹͣϵ�y(t��ng)����(d��o)��
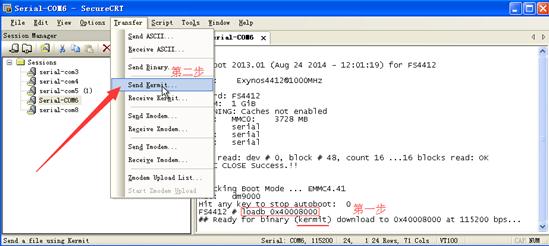
ݔ��u-boot ����# loadb 0x40008000 /*��ֵַ����Makefile �в��ҵ��Ğ��*/
��܇
Ȼ���ڴ��ڹ������x��transfer�ˆ����send kermit�x�

�x���ļ������о��g���ɵ� .bin�ļ��������ӵ�files to send �б���Ȼ���c��OK
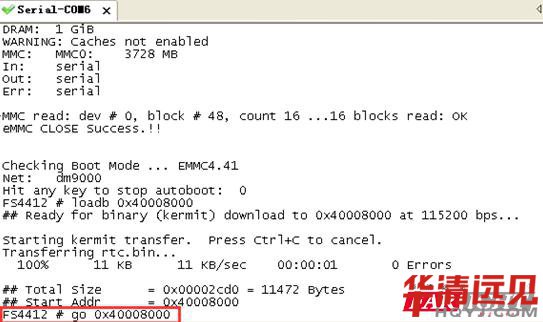
�ȵ���(sh��)��(j��)�����ꮅ��(zh��)�� # go 0x40008000 ���D(zhu��n)�����d���aλ�È�(zh��)�С�
�@�ӣ�������Ϳ������_�l(f��)�����Ԅ��\���ˡ�
��(d��ng)Ȼ����X���l�������@�ɗl������^�韩��Ҳ�������� ���ӵ� bootcmd���������С�
���ӷ�����
# setenv bootcmd loadb 0x40008000 \; go 0x40008000
#saveenv
������ɺ�ÿ���_�C u-boot ���Ԅ��\���@���ɗl����҂�ֻҪ�ڴ��ڹ����аl(f��)�;��g�õ�.bin �ļ�����������(zh��)�С�

 11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���cʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)�ʣ��Ҷ��M�������A���hҊ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���hҊ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���hҊ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���hҊ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���hҊ�˹������Y���A���hҊ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����
11�¾͘I(y��)�L(f��ng)�ư�ح���н�Y18k����н11k�����¾͘I(y��)���cʮ�¾͘I(y��)�L(f��ng)�ư�ح�x���A�� ��н�͘I(y��)�����ܶ����@���¾͘I(y��)�L(f��ng)�ư� | �͘I(y��)�΄ݵ��ԣ��A��W(xu��)�Ӆs��ݶ�������T�ܿɐ� ���YҲ���� 8��н�Y���t��һ�N���������e�˼ҵij���T����һ�N���YҲ�����e�����¾͘I(y��)�L(f��ng)�ư�|��һ�Q���@����Ƹ��(bi��o)�ʣ��Ҷ��M�������A���hҊ90+�Ŀ�@����������2021���
f(xi��)ͬ�����Ŀ���A���hҊ�s�@2021�vӍ��������ȿڱ�Ӱ����I(y��)����Ʒ�A���hҊ��������2021����h���k��У��Ϣ�W(xu��)�ƺ���(li��n)����ůͬ�й���(chu��ng)�ѿ� 2019�A���hҊ��������������ع�������УAI�˹����܌W(xu��)�ƽ��O(sh��) �A���hҊ�˹������Y���A���hҊ���������Ĵ�ʡ��(li��n)�W(w��ng)������s�@��(y��u)����I(y��)����

