 ���ڻ���ԭ��
�r�g��2017-11-06 ��Դ��δ֪
���ڻ���ԭ��
�r�g��2017-11-06 ��Դ��δ֪
�кܶ����^һ��Ƕ��ʽ�_�l�������������ڏ���Ƕ��ʽ�_�l���^�̮��У���Ҫ��Ƕ��ʽܛ��������ȷ��������о��^�࣬������Ҳ���ô����M���{ԇ����ֻ֪���������Á��ݔ�����õġ������ھ��w��ô�Á��ݔ�����s��̫����������ڵĹ���ԭ��Ҳ��һ֪��⡣���������´��ھ��w����ô�Á��ݔ�����ġ�
����ͨ�ŵĻ�������
• ��ͨ���I��ȣ��ЃɷN����ͨ�ŷ�ʽ������ͨ�źʹ���ͨ��
• ����ͨ��:
• Ӌ��C�cI/O�O��֮�g������ݔ�ĸ�λ�ǰ���������M�Ђ���,ͨ��������һ���������ϻ���һ����־��ς�ݔ��
• ����ͨ�ţ�
• Ӌ��C�cI/O�O��֮�gͨ�^���l��ݔ�����Q�����������ĸ�λͬ�r���͡�
• �����ٶ��������ǂ�ݔ�O��ɱ��ͣ������ìF�е�ͨ���ֶκ�ͨ���O���M���h��ͨ�š�����ͨ���ٶȿ죬���ǂ�ݔ�O��ɱ��ߣ��m�Ͻ����x�������͡���Ҫע�⣺һЩ��ִ���ͨ�ſ���(RS485,RS422,USB��)������ݔ���x�h���ҿ��ɔ_���������ٶ�Ҳ���^�졣
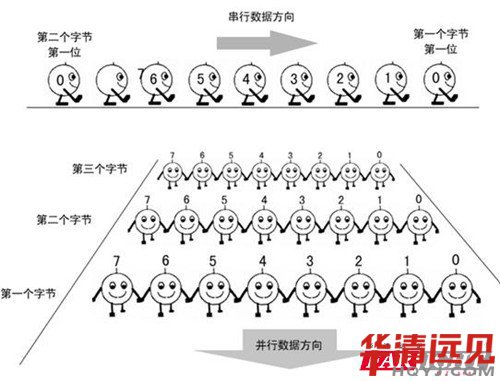
1.1.2 �����Ĵ��кͲ���ͨ�ŷ�ʽ
����ͨ�źñ���һ�пvꠣ�ÿ������Ԫ�����οv�����С���D2-57��ʾ����ݔ�rһ������һ�����صĴ��Ђ�ݔ��ÿ���r����ڂ�ݔһ�����أ��@�N��ݔ��ʽ�������^���Σ��ٶ��^��������ʹ�ÿ������^�٣�ͨ��һ�����վ���һ���l�;����Ɍ��F����ͨ�š�����ȱ�c��Ҫ�����~��Ĕ���������һ�����������_ʼ�ͽY����
����ͨ�źñ�һ�řMꠣ��R�^���Mͬ�r��ݔ���@�Nͨ�ŷ�ʽÿ���r����ڂ�ݔ�Ĕ��������係�����ȳ����ȣ����nj��F�^����s��UARTͨ�Ų��õ��Ǵ��з�ʽ�M��ͨ�ŵġ�
�D�鴮�Д���ͨ���c���Д���ͨ��
• ���ڵĔ�����ݔ���Դ��з�ʽ�M�еġ������ڔ���ͨ���У�һ��ֻ��ݔһ�����صĔ��������Д����Ă�ݔ�ٶ���bps�����ʁ�������
ע�⣺
�aԪ���ڔ���ͨ���г����Õr�g�g����ͬ�ķ�̖����ʾ���֡��@�ӵĕr�g�g��ȵ���̖�Q��aԪ���@���g���Q��aԪ�L��
�����ʣ�����Ϣ���������ʆ�λ����ÿ���ݔ���M�ƴ��aλ����bit/s
���^��ւ�ݔ�����ǰl�Ͷ��ڃɗl��̖���ς�ݔ��ֵ�����λ�෴�����̖�����նˌ����ܵăɗl����̖���p���\�㣬�@�ӫ@�÷�ֵ��������̖��
����ͨ���漰�ij����g�Z
• �ι������p����ȫ�p��
• �ι�(Simplex)
o ���c���H���M��һ������Ĕ�������
• ���p��(Half Duplex)
o ���c�����������ڃɂ��������M�Ђ��ͣ������@�N���ͽ^����ͬ�r�M�С�[�p����ͬ�r]
• ȫ�p��(Full Duplex)
o ���c���܉��ڃɂ�����ͬ�r�M�Д�������
• ������ݔ��
• ÿ���ݔ�Ķ��M��λ������λ��bps(bit per second)Ҳ�Q�����ʡ�
• ������ʽ�cͬ����ʽ
• ͬ��ͨ�ŷ�ʽ(Synchronous)���õĔ�����ʽ�]����ʼλ��ֹͣλ��һ���͵��ַ�������׃���ڂ���ǰ���Ȱ���һ���ĸ�ʽ�����N��Ϣ�b���һ������ԓ�����������շ��R�e�õ�ͬ���ַ�һ����ɂ������o����Ҫ���͵�n���ַ����ٺ����У��ַ���
• ������ʽ(Asynchronous)��Ҳ�Q“��ֹͬ��ʽ”��
•
��żУ�λ
��żУ�λ (Parity)��ָż�������攵��������һ�����ֵ����|���౻������Ӌ��CӲ�����e�`�z�y�С�
��żУ�λ��һ����ʾ�o��λ���Ķ��M�Ɣ��� 1 �Ă������攵߀��ż���Ķ��M�Ɣ�����żУ�λ�Ǻ��ε��e�`�z�y�a����żУ�λ�ЃɷN��ͣ�żУ�λ�c��У�λ��
1.1.1 ����ͨ�ź�ͬ��ͨ��
�D2-56ͬ����̖�c������̖
ͬ��ͨ�ż��g
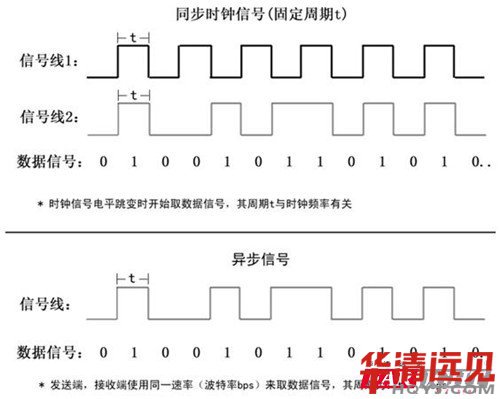
�ڰl�͔�����̖�ĕr��ͬ�r�ͳ�һ��ͬ���r���̖���Á�ͬ���l�ͷ��ͽ��շ��Ĕ����ɘ��l�ʡ���D2-56��ʾ��ͬ��ͨ�ŕr����̖��1��һ��ͬ���r���̖�����Թ̶����l���M���ƽ���ГQ�����l�����ڞ�t����ÿ���ƽ��������֮���M�Ќ�ͬ���ͳ��Ĕ�����̖��2�M�вɘ�(���ƽ����1�����ƽ����0)�������ɘӔ����ƽ�ߵ�ȡ��ݔ��������Ϣ������p���]��ͬ���r犵�Ԓ����ô���շ��Ͳ�֪���ɘ����ڣ�Ҳ�Ͳ���������ȡ�Ô�����Ϣ��
�D2-56ͬ����̖�c������̖
ͬ��ͨ�ż��g
�ڰl�͔�����̖�ĕr��ͬ�r�ͳ�һ��ͬ���r���̖���Á�ͬ���l�ͷ��ͽ��շ��Ĕ����ɘ��l�ʡ���D2-56��ʾ��ͬ��ͨ�ŕr����̖��1��һ��ͬ���r���̖�����Թ̶����l���M���ƽ���ГQ�����l�����ڞ�t����ÿ���ƽ��������֮���M�Ќ�ͬ���ͳ��Ĕ�����̖��2�M�вɘ�(���ƽ����1�����ƽ����0)�������ɘӔ����ƽ�ߵ�ȡ��ݔ��������Ϣ������p���]��ͬ���r犵�Ԓ����ô���շ��Ͳ�֪���ɘ����ڣ�Ҳ�Ͳ���������ȡ�Ô�����Ϣ��
����ͨ�ż��g
�ڮ���ͨ�ż��g�У������l�ͷ��͔������շ��]��ͬ���r犣�ֻ�Д�����̖����ֻ���^�l�Ͷ˺ͽ��ն˕����Յf�̺õąf�h(�̶��l��)���M�Д����ɘӡ������l�ͷ���ÿ���57600bits���ٶȰl�͔��������շ�Ҳ��57600bits���ٶ�ȥ���Ք������@�ӾͿ��Ա��C��������Ч�����_��ͨ������ͨ����ʹ�ò�����(Baud-Rate)��Ҏ���p����ݔ�ٶȣ����λ��bps(bits per secondÿ���ݔλ��)��
1.1.3 ����ͨ�ł�ݔģʽ
�ڔ���ͨ���^���У��l�ͷ��ͽ��շ����ˌ��F���������_�l�ͺͽ��գ�ͨ������һ����B�Ĵ�����������ǰ�������պͰl�͠�B�����l�ͷ��Д����l�͕r�����鿴�l�͠�B�Ĵ��������Ƿ����S�l�͔����������һ�Δ���߀�]�аl���ꮅ�������S�^�m�����l�ͣ����ڰl�����S��r�����ͳ�������ͬ�ӣ����ն�ͨ�^�鿴���ՠ�B�Ĵ������_���Ƿ����������_������Д������_����ȥ���Ք������_�^�xȡ������
��1��݆ԃģʽ
ͨ�^�������������ͣ�ęz�y��B�Ĵ����ĽY���������ǰ�ɰl�ͻ���գ��t�l�ͻ���Ք��������^�̿���������δ��a����ʾ��
݆ԃ��ʽ���F�����l�͂δ��a
Send()
{
While(1)
{
if(�l�͠�B == �ɰl��) // �z��Ĵ�����ֵ
���Д����l�Ͳ���;
}
}
݆ԃ��ʽ���F�������Ղδ��a
Receive()
{
While(1)
{
if(���ՠ�B == �Д������_)
���Д������ղ���;
}
}
�ɳ����֪���@�N��ʽ���F���Σ������M�Д������պͰl�͕r��Ҫ�M��ѭ�h�z���B�Ĵ�����ֵ�����]�Д������_�����ɰl�͕r��CPU��һֱ���D�����������ֵò���CPU�Ĉ��Й࣬��Ӱ�ϵ�y��Ч�ʡ�
��2���Д�ģʽ
�Дʽ��ָ�����������_���ɰl�͕r���a���Д֪࣬ͨCPUȥ�l�ͻ���Ք������@�N��ʽ��ͨ��Ӳ����CPU����������ͨ��Ӳ��ֻ���ڰl�ͻ���l���ʂ��֮���У���֪ͨCPUȥ̎�픵������ͨ�ŗl���]�Мʂ�õĕr��CPUȥ̎�����������@Ȼ�@�N��ʽ���������@�N��ʽҪ��ͨ��Ӳ��Ҫ����^�ߣ���Ҫ֧�֮a���Д���̖��
��3��DMAģʽ
ͨ�����F�������D�ƻ�ؐ�r��CPU����Դ��ַ̎���Ɣ������Ĵ�����Ȼ�Ĵ��������ٌ���Ŀ�ĵ�ַ̎��ԓ�����^����ҪCPU����С�FS4412֧��DMA��ʽ��ݔ����ͨ�Ŕ�����DMA��ݔ��ָ��CPU���������r�£�DMAӲ���Ԅӌ��F�������D�ƺ͏��ƣ���DMA��ݔ�^���У�CPU�����ø��棬�@�ӿ���CPU���ĵ�ȥ���Լ������顣�mȻ��ˣ�����DMA�ڂ�ݔ�����^����Ҫռ�ÿ������ڴ���������ݔ�r��ϵ�y��������DMAͨ��ռ�ã�Ҳ��Ӱ�ϵ�y��Ч�ʡ�
1.1 UART����
ͨ�î����������Ͱl����(Universal Asynchronous Receiver and Transmitter) ���QUART��ͨ����Ƕ��ʽ�O����Ĭ�J�������õ�ͨ�Žӿڡ�
��ʲôʹ�ô��ڣ�
�@����飬�ܶ�Ƕ��ʽ�O��]���@ʾ�����o���@��Ƕ��ʽ�O�䌍�r������Ϣ��ͨ�^UART���ںͳ����K�����B����ӡǶ��ʽ�O��ݔ����Ϣ�������ڌ�Ƕ��ʽϵ�y�M�и�ۙ���{ԇ�r��UART�����DZ�Ҫ��ͨ���ֶΡ�
�e����
���磺�W�j·���������Q�C�ȶ�Ҫͨ�^���ځ��M�����á�UART����߀���S��Ӳ������ݔ������Ҫ�ӿڣ���GPS����������ͨ�^UART����ݔ��GPS���Ք����ġ�
fs4412�����c��
1)4�M�հlͨ����ͬ�r֧���Д�ģʽ��DMA����
2)ͨ��0��1��2�����t��3ͨ����֧��64�ֹ�FIFO
3)ͨ��1��3֧�ָ��ٲ���ģʽ
4)֧������ģʽ�İl�ͺͽ���
1.1.4 UART������
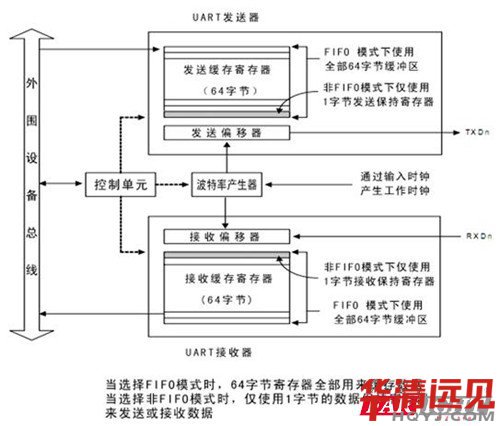
UART���������ṩ�����������Į�������I/O�˿ڣ�ÿ���˿ڶ��������Д�ģʽ��DMAģʽ�¹������Q����֮��UART���������Д��DMAՈ������CPU��UART֮�g�Ĕ�����ݔ��UART���ڒ����APB�����ϣ�APB�����߿����_��50MHz�����l�ʣ���ʹ��APB�r��l�ʕr�����_����115.2Kbps�����ʵ�ͨ���ٶȡ����UART���ڽ����ⲿ�O���ṩUEXTCLK���ⲿ�r犣���UART�����ڸ��ߵ��ٶ��¹�����ÿ��UART�����ڽ����b�úͰl���b����քe����һ��64Byte��FIFO���_�^�����ھ���l�͔����ͽ��Ք�����
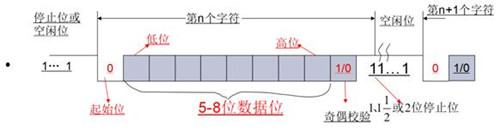
����UART�Ǵ��Ю���ͨ�ŷ�ʽ�������UARTͨ���^����ÿ��ֻ�܂�ݔ1λ��bit��,����λ�M��һ����������frame��������UARTͨ���л�����Ԫ������Ҫ�������_ʼλ������λ��У�λ������_���˔���УҪ����У�λ������ֹͣλ��
UART��ͨ��֮ǰҪ�ڰl�Ͷ˺ͽ��ն˼s���Î��Y����Ҳ���Ǽs���Â�ݔ��������ʽ��
l �_ʼλ����횰����ڔ������У���ʾһ�������_ʼ��
l ����λ�����x5��6��7��8λ��ԓλ�L�ȿ��ɾ����ˆTָ����
l У�λ��������_���˔���У�r��ԓλ���ָ����
l ֹͣλ�����x1��2λ��ԓλ�L�ȿ��ɾ����ˆTָ����
ͨ���p���s���Î���ʽ��ָ��ͬһ�����ʣ��Ա��C�p��������ݔ��ͬ����
1.1.5 UART���ڹ���ԭ��
ÿ��UART����һ�������ʮa�������l��������������һ�����Ɔ�Ԫ�����D��ʾ��
• �����г�Exynos4412 UART���P�Ŀ��ƼĴ��������wλ���xҊExynos4412оƬ�փ�
• UART�п�����ULCONn
• UARTģʽ���ƼĴ���UCONn
• UART FIFO���ƼĴ���UFCONn
• UART MODEM���ƼĴ���UMCONn
• �l�ͼĴ���UTXH�ͽ��ռĴ���URXH
• �����ʷ��l�Ĵ���UBRp2��UFRACVAL2
• UARTӲ���Y��
• UART���Ԯ�����ʽ���Fͨ�ŵģ���ɘ��ٶ��ɲ����ʛQ���������ʮa�����Ĺ����l�ʿ�����PCLK(����O���l��)��FCLK/n(CPU�����l�ʵķ��l)��UEXTCLK(�ⲿݔ��r�)�����r�����ݔ���l�ʣ��������O�üĴ����ǿɾ��̵ģ��Ñ������O���䲨���ʛQ���l�ͺͽ��յ��l�ʡ��l�����ͽ�����������64Byte��FIFO�͔�����λ����UARTͨ���������ֹ����ģ����l�͔�������FIFO֮����ؐ��������λ��(1�ֹ���С)�����ͨ�^�l�͔������_TXDn�l����ͬ�ӵ��������Ք���ͨ�^RXDn���_�����Ք���(1�ֹ���С)��������λ����Ȼ���俽ؐ��FIFO���վ��_�^�
• (1)�����l��
• �l�͵Ĕ������ɾ��̵ģ�����һ�����L�����Ñ�ָ���ģ�������һ���_ʼλ��5~8������λ��һ�����x����żУ�λ��1~2��ֹͣλ����������ʽ����ͨ�^�O��ULCONn�Ĵ������O�á��l����Ҳ���Ԯa��һ���Kֹ��̖��������һ��ȫ����0�Ĕ������M�ɡ��ڮ�ǰ�l�͔�������ȫ��ݔ���Ժ�ԓģ�K�l��һ���Kֹ��̖���ڽKֹ��̖�l�ͺ��������^�mͨ�^FIFO(FIFO)��l�ͱ��ּĴ���(NON-FIFO)�l�͔�����
• ��2����������
• ͬ�ӽ��ն˵Ĕ���Ҳ�ǿɾ��̵ģ����������Ԃɜy������e�`��żУ��e�`�����e�`�ͽKֹ�l����ÿ���e�`�������O��һ���e�`��־��
• l ����e�`��ָ���f�������xȡ��֮ǰ���������w���f����
• l ��żУ��e�`��ָ�������ɜy���˽��Ք���У�Y��ʧ�������Ք����oЧ
• l ���e�`��ָ���յ��Ĕ����]��һ����Ч��ֹͣλ���o���ж��������Y��
• l �Kֹ�l����ָRxDn���յ�����߉0��B���m�L��һ���������Ă�ݔ�r�g
• ��3���Ԅ�����AFC(Auto Float Control)
• Ӳ������ʹ�ô�����|���ƾ��ϵ�늉���̖�����Ɣ����İl�ͺͽ��ա�
• ����ͨӍ�е�Ӳ�������ЃɷN��ʽ��DTR/DSR��ʽ��RTS/CTS��ʽ��
• �Ԅ������ƿ��Կ����Ǵ��ڵ��_�P��uart2������AFC����
• UART0��UART1֧����nRTS��nCTS���Ԅ����أ�UART2��֧�����ء���AFC��r�£�ͨ���p��nRTS��nCTS���_�քe�B�ӌ�����nCTS��nRTS���_��ͨ�^ܛ�����Ɣ������İl�ͺͽ��ա�
• ���_��AFC�r���l�Ͷ˽��հl��ǰҪ�Д�nCTS��̖��B�������յ�nCTS������̖�r���l�͔�������ԓnCTS���_�B�ӌ���nRTS���_�����ն��ڜʂ���Ք�����ǰ���������FIFO�д���32���ֹ��Ŀ��e���g��nRTS���_���l�ͼ�����̖���������FIFOС��32���ֹ��Ŀ��e���g��nRTS����÷Ǽ����B����D2-60��ʾ��
• RTS ��Require ToSend���l��Ո��ݔ����̖������ָʾ���O��ʂ�ÿɽ��Ք��������ƽ��Ч�����ƽ�f�����O����Խ��Ք�����
• CTS ��Clear ToSend���l�����S����ݔ����̖�������Д��Ƿ�������l�͔��������ƽ��Ч�����ƽ�f�����O��������l�͔�����
• ��̎���ˌ�CTS���g��l�����S�����CTS�nj�����RTS���Ƽ�����CTS�Ƿ����S�l�͵Ĺ��ܡ�
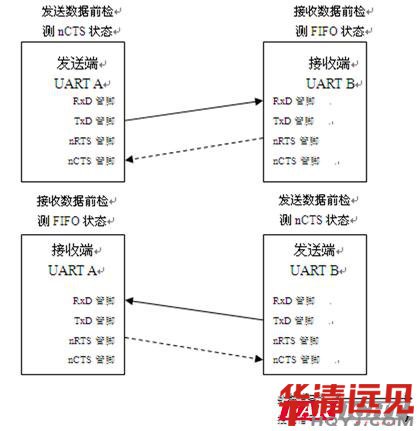
�D2-60�Ԅ����ؔ�����ݔ
��4��������
��UART�в����ʰl������l�����ͽ������ṩ�����r犡������ʰl�����ĕr�Դ�����x��FS4412�ăȲ�ϵ�y�r�(PCLK��FCLK/n)��UEXTCLK(�ⲿ�r�Դ)������ͨ�^�O��UCONn�Ĵ������O�ò����ʰl������ݔ��r�Դ��ͨ���҂��x��ʹ��PCLK����UART�����r犡�
UART�������Л]�Ќ��������M���O�õļĴ���������ͨ�^�O��һ���������ӣ���Q���䲨���ʡ���Ӌ�㹫ʽ���£�
UART����(UBRpn) = (int)(CLK/(buad rate * 16 )) - 1
���У�UBRpn��ȡֵ������ԓ��1~2^16-1�����磺�����ʞ�115200bps��PCLK�r犞��乤���l�ʣ�����50MHz��UBRpn�飺
UBRpn = (int)(50M / (115200 x 16)) - 1 = 26
��ϵ�y�r�δ��ʼ���r��PCLK = 12MHz����������ʲ���57600bps����ôUBRpn�飺
UBRpn = (int)(12M / (57600 x 16)) - 1 = 12
��ʹ���ⲿ�r�Դ�r������ⲿ�r�С��PCLK�r犣��tUEXTCLK��ԓ�O�Þ�0��
.������
�ڔ����ŵ��У��������ǔ�����̖�Ă�ݔ���ʣ����Æ�λ�r�g�Ȃ�ݔ�Ķ��M�ƴ��a����Чλ(bit)������ʾ�����λ��ÿ����ؔ�bit/s(bps)��ÿ��ǧ���ؔ�(Kbps)��ÿ���ױ��ؔ�(Mbps)����ʾ(��̎K��M�քe��1000��1000000���������漰Ӌ��C�惦�������r��1024��1048576)��
.������
������ָ������̖���d�����{�����ʣ����Æ�λ�r�g���d���{�Ơ�B��׃�Δ�����ʾ�����λ�鲨��(Baud)�� �������c�����ʵ��Pϵ�飺������=������X���{�Ơ�B�����Ķ��M��λ����
��΅^�փ��ߣ�
�@Ȼ�������{��(���{�Ơ�B����1�����M��λ)�ı����ʵ��ڲ����ʣ������{��(���{�Ơ�B����2�����M��λ)�ı����ʞ鲨���ʵăɱ��������{��(���{�Ơ�B����3�����M��λ)�ı����ʞ鲨���ʵ�������������ơ�
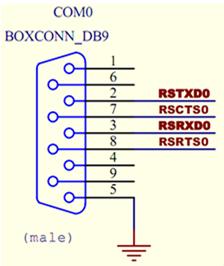
�D2-61 �_�l�崮��Ӳ���D
UART�Ľӿ�
�D2-61��Cortex-A9�_�l������UART���ڽӾ��D��������DB9�ӿڹ��^(�нӾ����Ķ˿ڣ�ֻ�нӾ��Ğ�ĸ�^)������9����̖����UARTͨ���^�����õ�����̖��2 RSTXD0(�����l���_)���ʹ��ھ�ĸ�^TXDx��̖�����(x����0̖��1̖��2̖����)����̖3 RSRXD0(�������չ��_)�ʹ��ھ�ĸ�^RXDx���(x����0̖��1̖��2̖����)����̖��5(�ӵع��_)����̖��7 RSCTS0(�����l�������ƹ��_)�ʹ��ھ�ĸ�^nCTSx��ӣ���̖��8 RSRTS0(�������������ƹ��_)�ʹ��ھ�ĸ�^nRTSx��ӡ����UART�Л]���_��AFC���ص�Ԓ��ֻҪ�õ���̖��2����̖��3����̖��5��
UART�Ĵ�������
UART0���п��ƼĴ���(ULCON0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
ULCON0 0x50000000 R/W ����0���п��ƼĴ��� 0x00
ULCON0 λ ���� ��ʼֵ
���� [7] 0
�t��ģʽ [6] �x��0�Ƿ�ʹ�üt��ģʽ��
0 = ����ͨ��ģʽ
1 = �t��ͨ��ģʽ 0
У�ģʽ [5:3] �O�ô���0�ڔ������պͰl�͕r���õ�Уʽ��
0xx = �o�
100 = ���
101 = żУ�
110 = ����У�/�z�y�Ƿ��1
111 = ����У�/�z�y�Ƿ��0 000
ֹͣλ [2] �O�ô���0ֹͣλ����
0 = ÿ��������һ��ֹͣλ
1 = ÿ������������ֹͣλ 0
����λ [1:0] �O�ô���0����λ����
00 = 5������λ 01 = 6������λ
10 = 7������λ 11 = 8������λ 00
ͨ�^�O��ULCON0���O��UART0ͨ�ŷ�ʽ��ULCON0[6]�x��ͨ�ŷ�ʽ��һ��ͨ��ģʽ��t��ͨ��ģʽ��ULCON0[5:3]�O�ô���0Уʽ��ULCON0[2]�O�ô���0ֹͣλ����ULCON0[1:0] �O�ô���0�Ĕ���λ����
�҂��x��һ��ͨ��ģʽ���oУ�λ��1��ֹͣλ��8������λ�Ĕ���ͨ�ŷ�ʽ����ˣ�
ULCON0 = 0x03;
��2-26 UART0���ڿ��ƼĴ�����UCON0��
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UCON0 0x50000004 R/W ����0���ƼĴ��� 0x00
UART0���п��ƼĴ���(ULCON0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
ULCON0 0x50000000 R/W ����0���п��ƼĴ��� 0x00
ULCON0 λ ���� ��ʼֵ
���� [7] 0
�t��ģʽ [6] �x��0�Ƿ�ʹ�üt��ģʽ��
0 = ����ͨ��ģʽ
1 = �t��ͨ��ģʽ 0
У�ģʽ [5:3] �O�ô���0�ڔ������պͰl�͕r���õ�Уʽ��
0xx = �o�
100 = ���
101 = żУ�
110 = ����У�/�z�y�Ƿ��1
111 = ����У�/�z�y�Ƿ��0 000
ֹͣλ [2] �O�ô���0ֹͣλ����
0 = ÿ��������һ��ֹͣλ
1 = ÿ������������ֹͣλ 0
����λ [1:0] �O�ô���0����λ����
00 = 5������λ 01 = 6������λ
10 = 7������λ 11 = 8������λ 00
ͨ�^�O��ULCON0���O��UART0ͨ�ŷ�ʽ��ULCON0[6]�x��ͨ�ŷ�ʽ��һ��ͨ��ģʽ��t��ͨ��ģʽ��ULCON0[5:3]�O�ô���0Уʽ��ULCON0[2]�O�ô���0ֹͣλ����ULCON0[1:0] �O�ô���0�Ĕ���λ����
�҂��x��һ��ͨ��ģʽ���oУ�λ��1��ֹͣλ��8������λ�Ĕ���ͨ�ŷ�ʽ����ˣ�
ULCON0 = 0x03;
��2-26 UART0���ڿ��ƼĴ�����UCON0��
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UCON0 0x50000004 R/W ����0���ƼĴ��� 0x00
UCON0 λ ���� ��ʼֵ
FCLK���l���� [15:12] ��UART0�x��FCLK����r�Դ�r���O����FCLK�ķ��l����
UART0 �����r��l�� = FCLK/FCLK���l���� + 6 0000
UART�r�Դ�x�� [11:10] �x��UART0�Ĺ����r�PCLK��UEXTCLK��FCLK/n��
00,10 = PCLK
01 = UEXTCLK
11 = FCLK/n
���x��FCLK/n����UART0�����r犕r߀Ҫ�������O�ã����wՈ�x�����в鿴Ӳ���փ� 00
�l�͔����Д�
�a����� [9] �O��UART0�Д�Ո����ͣ��ڷ�FIFO��ݔģʽ�£�һ���l�͔������_�^��գ������a���Д���̖����FIFO��ݔģʽ���_���l�͔����|�l�l���r�����a���Д���̖��
0 = �}�_�|�l
1 = �ƽ�|�l 0
���Ք����Д�
�a����� [8] �O��UART0�Д�Ո����ͣ��ڷ�FIFO��ݔģʽ�£�һ�����յ������������a���Д���̖����FIFO��ݔģʽ���_�����Ք����|�l�l���r�����a���Д���̖��
0 = �}�_�|�l
1 = �ƽ�|�l 0
���Ք������r [7] �O�î����Ք����r������������r���Ƿ�a�������Дࣺ
0 = ���_�����r�� 1 = �_�����r��
10 = 7������λ 11 = 8������λ 0
���Ք����e�`�Д� [6] �O�î����Ք����r������a�����������ݔ��ֹ�����e�`��У��e�`�r���Ƿ�a�����ՠ�B�Д���̖��
0 = ���a���e�`��B�� 1 = �a���e�`��B�� 0
����ģʽ [5] �O��ԓλ�rUART���M�����ģʽ��ԓģʽ�H���ڜyԇ
0 = ����ģʽ 1 = ����ģʽ 0
�l�ͽKֹ��̖ [4] �O��ԓλ�r��UART���l��һ�����L�ȵĽKֹ��̖���l���ꮅ��ԓλ�Ԅӻ֏͞�0
0 = ������ݔ 1 = �l�ͽKֹ��̖ 0
�l��ģʽ [3:2] �O�ò����Ă���ʽ���Д�������l�;��_�^
00 = �oЧ
01 = �Д�Ո����ԃģʽ
10 = DMA0Ո�� 00
����ģʽ [1:0] �O�ò����Ă���ʽ���Д���������վ��_�^
00 = �oЧ
01 = �Д�Ո����ԃģʽ
10 = DMA0Ո�� 00
ͨ��UART���ڲ���PCLK����ݔ�빤���r犣����ú��ε�݆ԃ��ʽ�M�Д������պͰl�ͣ����_���������ճ��r�������a���e�`�r���a���e�`��B�Д࣬��ˣ�
UCON0 = 0x05;
��2-27 UART FIFO���ƼĴ���(UFCON0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UFCON0 0x50000008 R/W ����0 FIFO���ƼĴ��� 0x00
UFCON0 λ ���� ��ʼֵ
�l�͔���
�|�l���e [7:6] �O��FIFO�l��ģʽ���|�l���e��
00 = FIFO����|�l 01 = 16�ֹ��|�l
10 = 32�ֹ��|�l 11 = 48�ֹ��|�l 00
���Ք���
�|�l���e [5:4] �O��FIFO����ģʽ���|�l���e��
00 = FIFO����|�l 01 = 16�ֹ��|�l
10 = 32�ֹ��|�l 11 = 48�ֹ��|�l 00
���� [3] 0
�l��FIFO���� [2] ������FIFO���Ԅ�����l�;��_�^
0 = ����ģʽ 1 = �Ԅ���� 0
����FIFO���� [1] ������FIFO���Ԅ�������վ��_�^
0 = ����ģʽ 1 = �Ԅ���� 0
����FIFO [0] 0 = ������FIFO 1 = ����FIFO 0
��2-28 UART MODEM���ƼĴ���(UMCON0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UMCON0 0x5000000C R/W ����0 MODEM���ƼĴ��� 0x00
UMCON0 λ ���� ��ʼֵ
���� [7:5] ���ȫ����0 000
AFC�Ԅ����� [4] 0 = ���_������ 1 = �_������ 0
���� [3:1] ���ȫ����0 000
Ո��l�� [0] �������AFC��ԓλ�oЧ��S3C2440���Ԅӿ� ��nRTS�����������AFC��nRTS�����ܛ������
0 = ���ƽ����nRTS 1 = ���ƽ����nRTS 0
��2-29 UART �l��/���ՠ�B�Ĵ���(UTRSTAT0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UTRSTAT0 0x50000010 R/W ����0�l��/���ՠ�B�Ĵ��� 0x06
UTRSTAT0 λ ���� ��ʼֵ
�l������� [2] ���l�;���Ĵ����Л]�Д���Ҫ�l���Ұl����λ�Ĵ�����Օr���Ԅ���1
0 = �ǿ�
1 = �l�������(�l�;������λ�Ĵ���) 1
�l�;���Ĵ������ [1] ���l�;���Ĵ�����Օr���Ԅ���1
0 = �l�;���Ĵ����ǿ�
1 = �l�;���Ĵ������ 1
���վ���Ĵ������ [0] �����վ���Ĵ����Д������_�r���Ԅ���1
0 = ���վ���Ĵ������
1 = ����Ĵ������Ք��� 0
��2-30 UART �l�;���Ĵ�����UTXH0��
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UTXH0 0x50000020(L)
0x50000023(B) W ����0�l�;���Ĵ��� -
��2-31 UART ���վ���Ĵ���(URXH0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
URXH0 0x50000024(L)
0x50000027(B) R ����0���վ���Ĵ��� -
��2-32 UART �����ʳ����Ĵ���(UBRp0)
�Ĵ����� ��ַ �Ƿ��x�� ���� ��λĬ�Jֵ
UBRp0 0x50000028 R/W ����0�����ʳ����Ĵ��� -
UBRp0 λ ���� ��ʼֵ
�����ʳ��� [15:0] �O�ò����ʳ���(����0)ʹ���ⲿݔ��r犕r������0 -
�����Ĵ������Ǻ�UARTͨ�����P�Ĵ�����ʹ�ú��εğoFIFO���o�Ԅ�����AFC�r���O�����£�
UFCON0 = 0x00; // ��ʹ��FIFO
UMCON0 = 0x00; // ��ʹ������
UBRp0 = 26; // �����ʞ�115200,PCLK=50Mhz
UBRp0 = 53; // �����ʞ�57600,PCLK=50Mhz
UBRp0 = 12; // �����ʞ�57600,PCLK=12Mhz
UTXH0��URXH0�քe�ǔ����l�ͺͽ��ռĴ������l�͔����rͨ�^݆ԃ��ʽ�Д�l�͠�B�Ĵ����Ġ�B�������l�͔����r������UTXH0�Ĵ���������������Ք����r����݆ԃ��ʽ�z�y���ՠ�B�Ĵ�����B�����Д������_�r���xȡURXH0�Ĵ�����Ĕ�������ȡ�ô��ڔ�����
���ܲ�ͬ���_�l�壬��ͬ�S�����a�OӋ���_�l��������ͬ������ļĴ���������Ҳ�����Ѕ^�e��ԭ����һ�ӵġ�




