 ZigBee�f�h��֮osal�\��
�r�g��2018-09-27 ��Դ��δ֪
ZigBee�f�h��֮osal�\��
�r�g��2018-09-27 ��Դ��δ֪
ZigBee��Ŀǰ���^���е�һ�N���ğo���M�W���g����Ҫ�������ܼҾӿ����Լ����ܹ��I���a��ZigBee������c���ǵ��ġ��ԽM�W��
�������õ�ַ��//m.gxqdgs.com/emb/Column/7541.html
�f��ZigBee�Ͳ��ò���IEEE802.15��ZigBee�ˣ����������ƶ���ZigBee�f�h���Ę˜ʡ��M�W�^�̾��ǻ���ZigBee�f�h�����f�h������˽^�ֵĹ��������o�Ñ��ľ��Ǒ��ó���ӿڡ��f�h������һ������ϵ�yһ�ӣ��Ñ�ֻ��Ҫ���Ƒ��ó���Ϳ���ʹ�á�
�ȁ���һ��ZigBee�f�h���ܘ�������ϵ�y����Ŀ��Ԯ���BootLoader������ϵ�y����Ŀ��Կ������ó������Ñ���f��ֻҪ�˽����ϵ�y��������task����ô�Ϳ���ʹ�Åf�h���ˡ�
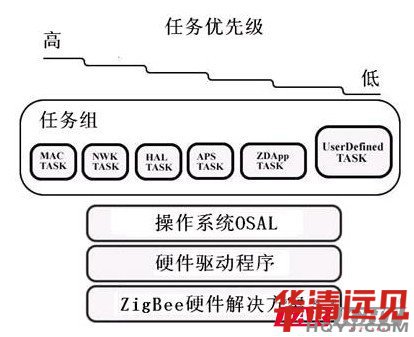
�����҂���TI��˾��ZigBee�f�h����˜ʣ��˽�һ��osal����ϵ�y�C�ƣ��Է�����m����task��
OsalԴ��һ�N���εIJ���ϵ�y˼��---݆ԃ����ZigBee�f�h���У�OSALؓ؟�{�ȸ����΄յ��\�У�������¼��l���ˣ��t���{���������¼�̎�������M��̎������ô���¼����΄յ��¼�̎�����������ϵ��������?
ZigBee�в��õķ����ǣ�����һ���¼�������������΄յČ������¼���������һ������������������΄յ��¼�̎�������ĵ�ַ��Ȼ���@�ɏ�������ij�N�����Pϵ����ijһ�¼��l���r�t���Һ������ҵ��������¼�̎���������ɡ�
��ZigBee�f�h���У�������׃�����P��Ҫ��
�� tasksCnt—ԓ׃���������΄յĿ�������
ԓ׃�������飺uint8 tasksCnt������uint8�Ķ��x�飺typedef unsigned char uint8
�� tasksEvents—�@��һ��ָᘣ�ָ�����¼�������ַ��
ԓ׃�������飺uint16 *tasksEvents������uint16�Ķ��x�飺typedef unsigned short uint16
�� tasksArr—�@��һ�����M�����M��ÿһ헶���һ������ָᘣ�ָ�����¼�̎��������
ԓ���M�����飺const pTaskEventHandlerFn tasksArr[]������pTaskEventHandlerFn�Ķ��x�飺typedef unsigned short (*pTaskEventHandlerFn)( unsigned char task_id, unsigned short event )���@�Ƕ��x��һ������ָᘡ�tasksArr���M��ÿһ헶���һ������ָᘣ�ָ�����¼�̎��������
�¼����ͺ��������Pϵ���D
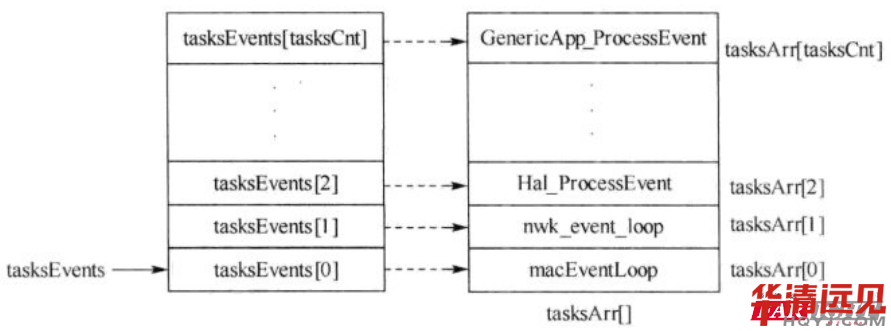
�҂��F�ځ����Y��OSAL�Ĺ���ԭ����ͨ�^tasksEventsָ��L���¼�����ÿһ헣�������¼��l�����t���Һ������ҵ��¼�̎�������M��̎����̎������^�m�L���¼������鿴�Ƿ����¼��l�����o��ѭ�h��OSAL����һ�N�����¼��ӵ�݆ԃʽ����ϵ�y���¼�����ָ�l���¼����ȡ�������¼�̎��������݆ԃָ���Dz���ز鿴�Ƿ����¼��l����
����Ĵ��a�п�һ��osal�\�ЙC�ơ���Zmain�ļ��A���Ђ�Zmain.c�ļ������_ԓ�ļ�����
�ҵ�main()�������@���������f�h��������c��main()����ԭ�����£�
int main( void )
{
// Turn off interrupts
osal_int_disable( INTS_ALL );
// Initialization for board related stuff such as LEDs
HAL_BOARD_INIT();
// Make sure supply voltage is high enough to run
zmain_vdd_check();
// Initialize board I/O
InitBoard( OB_COLD );
// Initialze HAL drivers
HalDriverInit();
// Initialize NV System
osal_nv_init( NULL );
// Initialize the MAC
ZMacInit();
// Determine the extended address
zmain_ext_addr();
// Initialize basic NV items
zgInit();
#ifndef NONWK
// Since the AF isn't a task, call it's initialization routine
afInit();
#endif
// Initialize the operating system
osal_init_system();
// Allow interrupts
osal_int_enable( INTS_ALL );
// Final board initialization
InitBoard( OB_READY );
// Display information about this device
zmain_dev_info();
/* Display the device info on the LCD */
#ifdef LCD_SUPPORTED
zmain_lcd_init();
#endif
#ifdef WDT_IN_PM1
/* If WDT is used, this is a good place to enable it. */
WatchDogEnable( WDTIMX );
#endif
osal_start_system(); // No Return from here
return 0; // Shouldn't get here.
} // main()
��osal_start_system()����֮ǰ�ĺ������nj����dӲ���Լ��f�h���M�еij�ʼ����ֱ���{��osal_start_system()����������ZigBee�f�h���������������\�������ˡ�Ӳ���Ӳ���Ҫ����҂����D��osal_start_system()���鿴һ������ԭ��
void osal_start_system( void )
{
#if !defined ( ZBIT ) && !defined ( UBIT )
for(;;) // Forever Loop
#endif
{
uint8 idx = 0;
osalTimeUpdate();
// This replaces MT_SerialPoll() and osal_check_timer().
Hal_ProcessPoll();
do {
// Task is highest priority that is ready.
if (tasksEvents[idx])
{
break;
}
} while (++idx < tasksCnt);
if (idx < tasksCnt)
{
uint16 events;
halIntState_t intState;
HAL_ENTER_CRITICAL_SECTION(intState);
events = tasksEvents[idx];
// Clear the Events for this task.
tasksEvents[idx] = 0;
HAL_EXIT_CRITICAL_SECTION(intState);
events = (tasksArr[idx])( idx, events );
HAL_ENTER_CRITICAL_SECTION(intState);
// Add back unprocessed events to the current task.
tasksEvents[idx] |= events;
HAL_EXIT_CRITICAL_SECTION(intState);
}
#if defined( POWER_SAVING )
// Complete pass through all task events with no activity?
else
{
// Put the processor/system into sleep
osal_pwrmgr_powerconserve();
}
#endif
}
}
���ȿ������悀osal����һ��forѭ�h�Ј��еģ��@����ζ��������¼�һֱ�ڲ�ͣ���؏ͣ�Ҳ��osal�Ļ��A��
��6�У����x��һ��׃��idx���Á����¼�����������
��7-9�У�����ϵ�y�r犣�ͬ�r�鿴Ӳ�������Ƿ����¼��l�����紮���Ƿ��յ��������Ƿ��а��I���µ���Ϣ���@���փ����ڴ˿��ԕ��r���迼�]��
��10-16�У�ʹ��do-whileѭ�h�鿴�¼����Ƿ����¼��l��������һ���@��ѭ�h��������¼��l������ô������ѭ�h��ȥ����Ĵ��a̎���¼�������]���¼�����ô���^�m������е���һ헡���Ȼ�悀ѭ�h�ĴΔ����ö���tasksCnt�������ӛ����¼��Ŀ�����
��18~35�����¼���̎���^�̣�23��27��Ҏ����һ���R��^��24��ȡ���¼���������events׃����26�Єt�����е��¼����㣬����¼��ѽ���ȡ����Ҫ̎����27�и���id�ҵ������ĺ�����������̎�������������õ�����ֵ(�����ጷ���ֵ)��31��34������һ���R��^��33�����¼������xֵ��
�����˽���osal�Ļ���ԭ�������ǃɏ����IJ�ԃ�͌�������ô��������һ��events�������c����ʲô̎�����¼��r���ַ���һ��events(24��)������߀��events�Żص��¼���(33��)��
ZigBee�f�h��ʹ��һ��unsigned short�͵�׃�������unsigned short���ռ�ɂ��ֹ�����16�����M��λ����ˣ�����ʹ��ÿ�����M��λ��ʾһ���¼����҂������ f�h�����x��ϵ�y�¼�SYS_EVENT_MSG��ʮ���M�ƣ�0x8000�����M�ƣ�0b1000000000000000�����õľ��Ǹ�λ����ʾԓ�¼���
���Կ�����һ���΄��ж�ֻ����16���¼������events��һ��16λ������
��ϵ�y��ʼ���r�������΄յ��¼���ʼ����0����ˣ���10��ͨ�^tasksEvents[idx]�Ƿ��0���Д��Ƿ����¼��l����������¼��l���ˣ��t����ѭ�h��
29�Ј������¼�̎����������Ҫ��δ̎�����¼����أ�Ҳ�����f�¼�̎�������ķ���ֵ������δ̎�����¼�����ԓ�¼��ڌ����¼����У��Ա����´��M��̎������һ�������̎������
uint16 SampleApp_ProcessEvent( uint8 task_id, uint16 events )
{
if ( events & SAMPLEAPP_SEND_PERIODIC_MSG_EVT )
{
// Send the periodic message
SampleApp_SendPeriodicMessage();
// Setup to send message again in normal period (+ a little jitter)
osal_start_timerEx( SampleApp_TaskID, SAMPLEAPP_SEND_PERIODIC_MSG_EVT,
(SAMPLEAPP_SEND_PERIODIC_MSG_TIMEOUT + (osal_rand() & 0x00FF)) );
// return unprocessed events
return (events ^ SAMPLEAPP_SEND_PERIODIC_MSG_EVT);
}
// Discard unknown events
return 0;
}
ǰ���ѽ��f�����¼���һ�����M��λ1����ʾ����ôһ��“�c”�����Ϳ����Д���������Л]���¼�����return����“����”���@�ӿ��Ԍ��ѽ�̎�����¼���������������С�������eһ�����H�����ӣ��м�Ӌ��һ��֮������l�F�Ĵ_���@�N����������
��ZigBee�f�h���У��Ñ����Զ��x�Լ����¼������ǣ��f�h��ͬ�rҲ�o���ˎׂ��ѽ����x�õ��¼����Ʌf�h�����x���¼��ɞ�ϵ�y�����¼�(Mandatory Events)��SYS_EVENT_MSG�������е�һ���¼���SYS_EVENT_MSG�Ķ��x���£�
��SAMPLEAPP_SEND_PERIODIC_MSG_EVT�¼� �Dz��Ǿ����Ñ��Լ����x���¼���?�ǵ�!�҂����������Ķ��x��
�ᵽ�¼����҂��Ͳ��ò��ᵽ��Ϣ���¼������΄�ȥ����ijЩ�����ėl������ϵ�y�Юa����һ���¼���OSAL���@���¼����f�o�������΄պ��΄ղ��܈���һ�������IJ���(�{���¼�̎������ȥ̎��)��
ͨ��ijЩ�¼��l���r���ְ��S��һЩ������Ϣ�Įa�������磺���쾀���յ��������a��AF_INCOMING_MSG_CMD��Ϣ�������΄յ��¼�̎��������̎���@���¼��ĕr��߀��Ҫ�õ��յ��Ĕ�����
��ˣ��@����Ҫ���¼��͔������b��һ����Ϣ������Ϣ�l�͵���Ϣ��У�Ȼ�����¼�̎�������оͿ���ʹ��osal_msg_receive,����Ϣ����еõ�ԓ��Ϣ�����´��a���ԫ@��ָ�����Ϣ����еõ���Ϣ��ָᘡ�
��ʹ��ZigBee�f�h���M�Б��ó����_�l�r������ڑ��ó���������һ�����΄���?
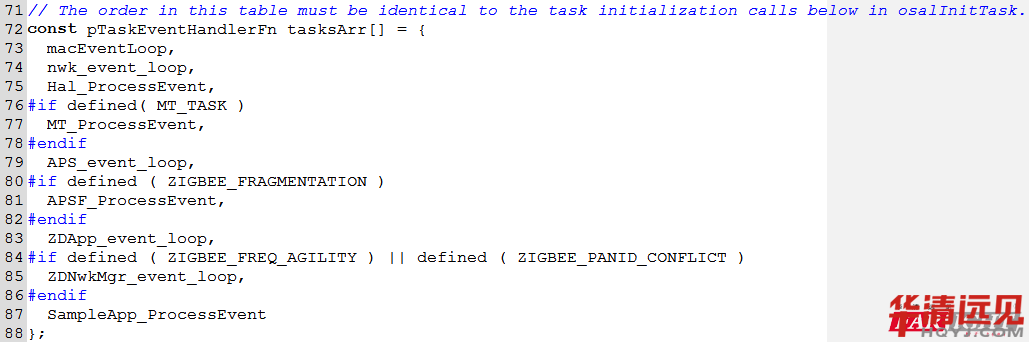
���_OSAL_SampleApp.c�ļ��������ҵ����MtasksArr[]�ͺ���osalInitTasks()��tasksArr[]���M���������е��¼�̎�������ĵ�ַ;osalInitTasks()��OSAL���΄ճ�ʼ�������������΄յij�ʼ�����������@��߅��ɣ������Ԅӽoÿ���΄շ���һ��ID��
��ˣ�Ҫ�������΄գ�ֻ��Ҫ�����ɂ�������
�� ���΄յij�ʼ��������
�� ���΄յ��¼�̎��������
���¼�̎�������ĵ�ַ����tasksArr[]���M�����´��a��ʾ��
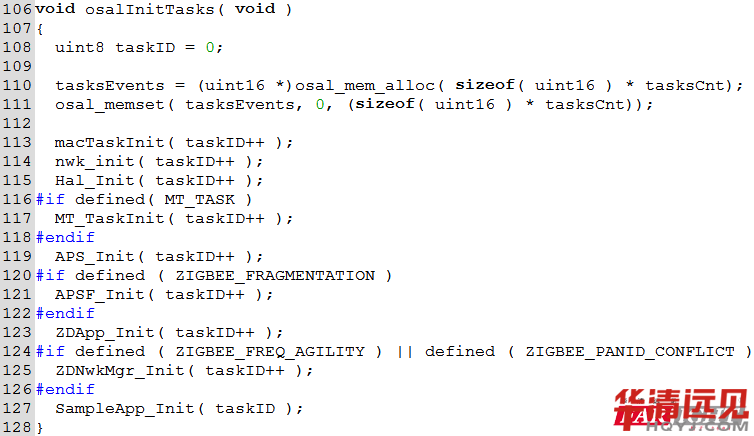
�����΄յij�ʼ������������osalInitTasks()�����ĺ����´��a��ʾ��
�҂���Ҫע����ǣ�
tasksArr[]���M����¼�̎���������������Ҫ�cosalInitTasks�������{�ø��΄ճ�ʼ�����������һ�£�ֻ���@�Ӳ��ܱ��C���΄����¼��l���r���{��ÿ���΄Ռ������¼�̎�����������˱���osalInitTasks()������������΄�ID����Ҫ�oÿһ���΄ն��xһ��ȫ��׃��������SampleApp.c�ļ��ж��x��һ��ȫ��׃��SampleApp_TaskID,������osalInitTasks()�������M�����xֵ��
�҂��F�ڿ��Y��OSAL���\�ЙC����
�� ͨ�^����ز�ԃ�¼�����Д�ÿ���΄����Ƿ����¼��l����������¼��l�����t���Һ������ҵ��������¼�̎���������¼��M��̎����
�� �¼���ʹ�Ô��M�팍�F�����M��ÿһ헌���һ���΄յ��¼���ÿһλ��ʾһ���¼�;������ʹ�ú���ָᘔ��M�팍�F�����M��ÿһ���һ������ָᘣ�ָ�����¼�̎��������




