һ��Exynos4412 A/D�D�Q������
1. ����
ADC(Analog-to-Digital Converter)������
ģ���D�Q�����������Ͽ���A�҂��Q��ģ�M��̖(Analog signal)��D�҂��Q�锵����̖(digital signal)��
ģ���D�Q��������Ӽ��g�м��nj�ģ�M��̖�D�Q�ɔ�����̖��Ҳ�Q�锵����������Ȼ߀��һ�N��DAC�����ǔ�ģ�D�Q����˼�෴�����nj�������̖�D�Q��ģ�M��̖��
���҂����ճ������У��������ܶ���������������ܶ�����텢�������У��҂��������������텢�����������늉����ضȡ��������ٶȵ��������������ģ�M����
ģ�M���Ĵ�С���B�m�ֲ��ģ��ҽ���Ҳ�Ǖr�g�ϵ��B�m������ҪʹӋ��C���փx�����R�e��̎���@Щ��̖��������Ȍ��@Щģ�M��̖�D�Q�ɔ�����̖������Ӌ��C������̎����ݔ���Ĕ�����Ҳ������Ҫ�����D�Q������ģ�M��̖���ܞ���ЙC�������ܡ��@�ӣ�����Ҫһ�N����ģ�M��̖�c������̖֮�g��������õ��·—
ģ���͔�ģ�D�Q����
2. ���
Ŀǰ��Ҋ��A/D�D�Q���У��У�
�����W�jD/A�D�Q������T�����W�jD/A�D�Q�����������D/A�D�Q��������ݾW�jD/A�D�Q�����_�P����D/A�D�Q����
3.
A/D�D�Q��Ҫ���gָ��
1���ֱ���
A/D�D�Q���ķֱ�����ݔ�����M�Ɣ���λ����ʾ��λ��Խ�࣬�`��ԽС���D�Q����Խ�ߡ�
2�������`��
��A/D�D�Q�������������a���Ĺ����`������`����±1/2LSB�������Чλ��֮�g��
3���D�Q�r�g
�D�Q�r�g��ָA/D�D�Q�����һ���D�Q����ĕr�g���D�Q�r�g��ָ�Ľӵ��D�Q������̖�_ʼ����ݔ���˵õ������Ĕ���ݔ����̖�����^���@�Εr�g��
4��ƫ���`��
ݔ����̖����rݔ����̖�������ֵ��������λ���{����С��
5���M�̶��`��
�M�̶�ݔ���r������ݔ����̖�c����ݔ����ֵ̖֮�
6�����Զ�
���H�D�Q�����D�ƺ����c����ֱ�������ƫ�ƣ�����������3�N�`�
����ָ��߀�У��^�����ȣ�Absolute Accuracy�����������ȣ�Relative Accuracy�����ַǾ��ԡ����{�Ժ͟o�e�a�����C��ʧ�棨Total Harmonic Distortion��THD���ͷe�ַǾ��ԡ�
����Exynos 4412 A/D�D�Q������
1.����
10λ��12λCMOS��ѭ�hʽģ�M�����D�Q����������10ͨ��ݔ�룬���Ɍ�ģ�M���D�Q��10λ��12λ���M�Ɣ���5Mhz A/D �D�Q�r犕r�����1Msps���D�Q�ٶȡ�A/D�D�Q�߂�Ƭ�ϲɘӱ��ֹ��ܣ�ͬ�rҲ֧�ִ��C����ģʽ��
2.����
ADC�ӿڰ����������ԡ�
1��10bit/12bitݔ��λ���x��
2�����`�� 1.0LSB��
3���e���`�� 2.0LSB��
4������D�Q����5Msps.
5) �����٣�늉�ݔ��1.8V��
6��늉�ݔ�뷶�� 0~1.8V��
7��֧��ƫ�Ϙӱ����ֹ��ܡ�
8��ͨ���D�Qģʽ��
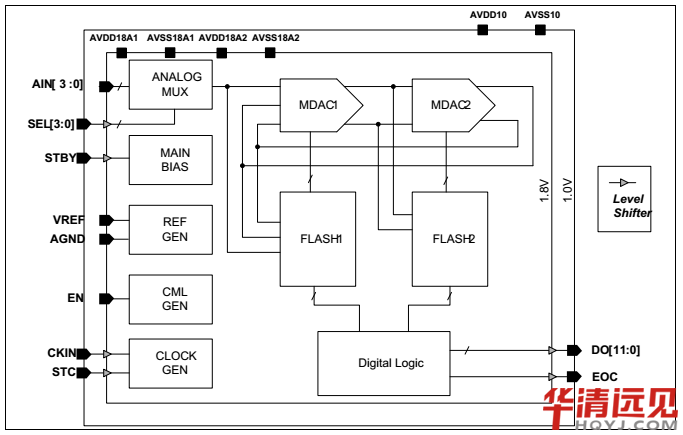
3. A/D����ģ�K�D
�D1 ADC Functional Block Diagram
2. Exynos4412 A/D �������Ĵ���
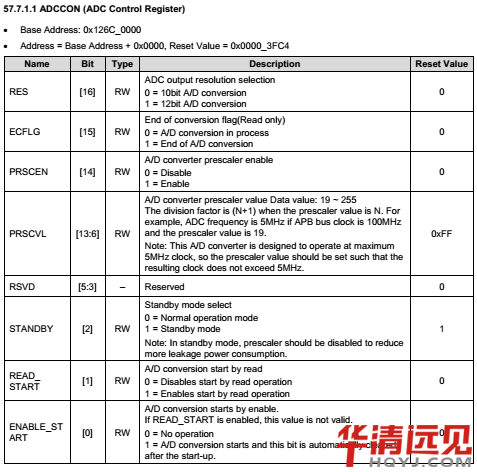
1��A/D���ƼĴ���ADCCON
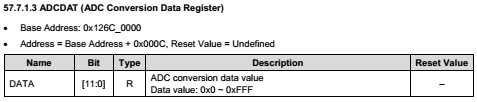
2��A/D�����Ĵ���
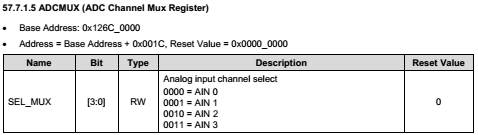
3��A/Dͨ��Mux�Ĵ���
����A/D�D�Q������
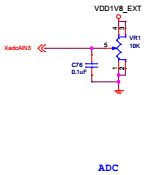
1. �·�B�����£�
����һ���λӋݔ��늉���4412��AIN3���_��ݔ���늉�������0~1.8V��
1. ���a���£�
#include <asm/ioctl.h>
#include <linux/module.h>
#include <linux/kernel.h>
#include <linux/fs.h>
#include <linux/cdev.h>
#include <linux/device.h>
#include <linux/uaccess.h>
#include <asm/io.h>
#define ADC_MAGIC 'A'
#define CMD_ONE 1
#define ADC_CMD_GET _IOR(ADC_MAGIC, CMD_ONE, int)
//�Ĵ������x
#define ADC_CFG (0x10010118)
#define ADCCON (0x126C0000)
#define ADCDAT (0x126C000C)
#define ADCMUX (0x126C001C)
dev_t dev;
int minor_base = 0;
int adc_count = 1;
char adc_name[] = "adc";
struct cdev *pcdev = NULL;
struct class *pcls = NULL;
static unsigned int *adccfg;
static unsigned int *adcmux;
static unsigned int *adccon;
static unsigned int *adcdat;
int AdcInit(void)
{
int ret = 0;
adccfg = ioremap(ADC_CFG, 4);
if (adccfg == NULL) {
printk("ioremap adccfg\n");
ret = -ENOMEM;
return ret;
}
adcmux = ioremap(ADCMUX, 4);
if (adcmux == NULL) {
printk("ioremap adcmux\n");
ret = -ENOMEM;
goto ERR1;
}
adccon = ioremap(ADCCON, 4);
if (adccon == NULL) {
printk("ioremap adccon\n");
ret = -ENOMEM;
goto ERR2;
}
adcdat = ioremap(ADCDAT, 4);
if (adcdat == NULL) {
printk("ioremap adcdat\n");
ret = -ENOMEM;
goto ERR3;
}
//ADC_CFG &= ~(0x1 << 16);
writel(readl(adccfg) & ~(0x1<<16), adccfg); //Bit_16:Select ADC Mux 0:General ADC, 1:MTCADC
//ADCMUX = 0x3;
writel(3, adcmux); //0x3: 0011 = AIN3 //ԭ��D���_�鵽XadcAIN3
//12bit A/D conversion; enable A/D converter prescaler; prescaler value:20; A/D conversion start by read
//ADCCON = (0x1<<16) | (0x1<<14) | (19<<6) | 0x1<<1;
//ADCDAT & 0xfff;
writel((0x1<<16) | (0x1<<14) | (19<<6) | 0x1<<1, adccon);
return 0;
ERR3:
iounmap(adccon);
ERR2:
iounmap(adcmux);
ERR1:
iounmap(adccfg);
return ret;
}
unsigned int adc_get(void)
{
unsigned int adc_value;
unsigned int temp_value;
readl(adcdat);
while(!(readl(adccon) & (0x1<<15)));
adc_value = readl(adcdat) & 0xfff;
temp_value = 9999 * adc_value / 4095;
return temp_value;
}
long adc_ioctl (struct file *filp, unsigned int cmd, unsigned long arg)
{
//printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
switch (cmd) {
case ADC_CMD_GET:
*(unsigned int *)arg = adc_get();
break;
default:
return -EINVAL;
}
return 0;
}
struct file_operations fops = {
.owner = THIS_MODULE,
.unlocked_ioctl = adc_ioctl,
};
int adc_init(void)
{
int ret;
int major;
struct device *pdevice = NULL;
//printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
ret = alloc_chrdev_region(&dev, minor_base, adc_count, adc_name);
if (0 > ret) {
printk("Can't get device number\n");
return ret;
}
pcdev = cdev_alloc();
if (NULL == pcdev) {
printk("cdev alloc failed.\n");
ret = -ENOMEM;
goto UNREG_DEV_NUM;
}
cdev_init(pcdev, &fops);
pcdev->owner = THIS_MODULE;
ret = cdev_add(pcdev, dev, adc_count);
if (0 > ret) {
printk("add cdev failed.\n");
goto DEL_CDEV;
}
pcls = class_create(pcdev->owner, adc_name);
if (IS_ERR(pcls)) {
printk("class create failed.\n");
ret = PTR_ERR(pcls);
goto DEL_CDEV;
}
major = MAJOR(dev);
pdevice = device_create(pcls, NULL, MKDEV(major, minor_base), NULL, "%s%d", adc_name, minor_base);
if (IS_ERR(pdevice)) {
printk("device %s%d create failed.\n", adc_name, minor_base);
ret = PTR_ERR(pdevice);
goto DESTROY_CLASS;
}
//printk("Body temperature module init done!\n");
if (0 != AdcInit())
{
goto DESTROY_CLASS;
}
printk("adc init\n");
return 0;
DESTROY_CLASS:
class_destroy(pcls);
DEL_CDEV:
cdev_del(pcdev);
UNREG_DEV_NUM:
unregister_chrdev_region(dev, adc_count);
return ret;
}
void adc_exit(void)
{
device_destroy (pcls, MKDEV(MAJOR(dev), minor_base));
class_destroy(pcls);
cdev_del(pcdev);
unregister_chrdev_region(dev, adc_count);
printk("Good bye, adc module\n");
//printk("%s:%s:%d\n", __FILE__, __func__, __LINE__);
}
module_init(adc_init);
module_exit(adc_exit);
MODULE_LICENSE("GPL");
MODULE_AUTHOR("Ruth Wei");
MODULE_DESCRIPTION("adc for demo");
MODULE_VERSION("1.0.1");
2. ���g�yԇ
���^���澎�g���d�ӣ���һ�����ó�������xȡADC�D�Q���ֵ��
�ġ����Y
���ď�ģ���D�Q���ļ��gָ�˺��·�B�ӵȷ����M�з�������K�����ӳ�������4412�������M�Мyԇ��
 ģ���D�Q�·
�r�g��2018-03-30 ��Դ��δ֪
ģ���D�Q�·
�r�g��2018-03-30 ��Դ��δ֪